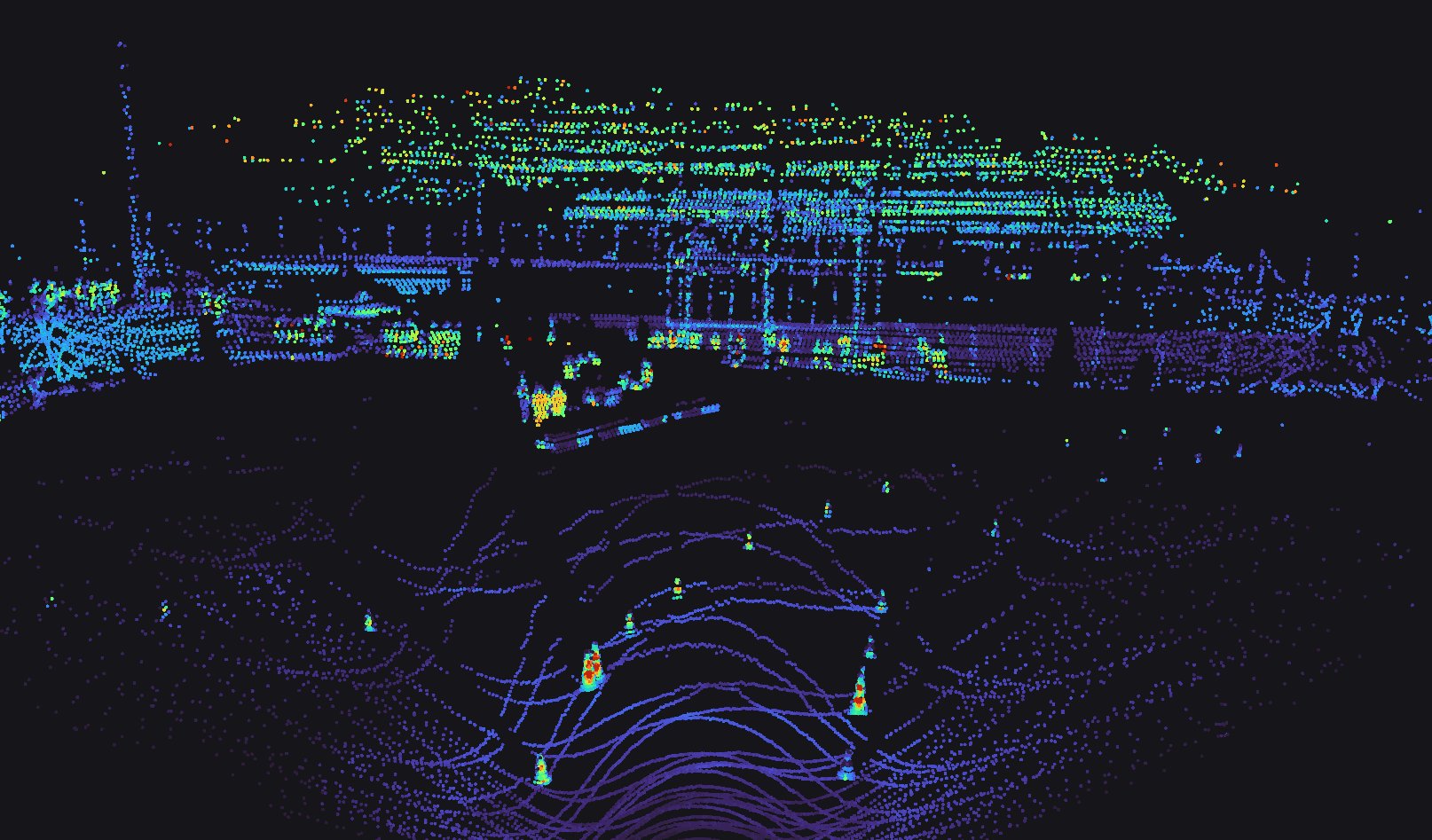
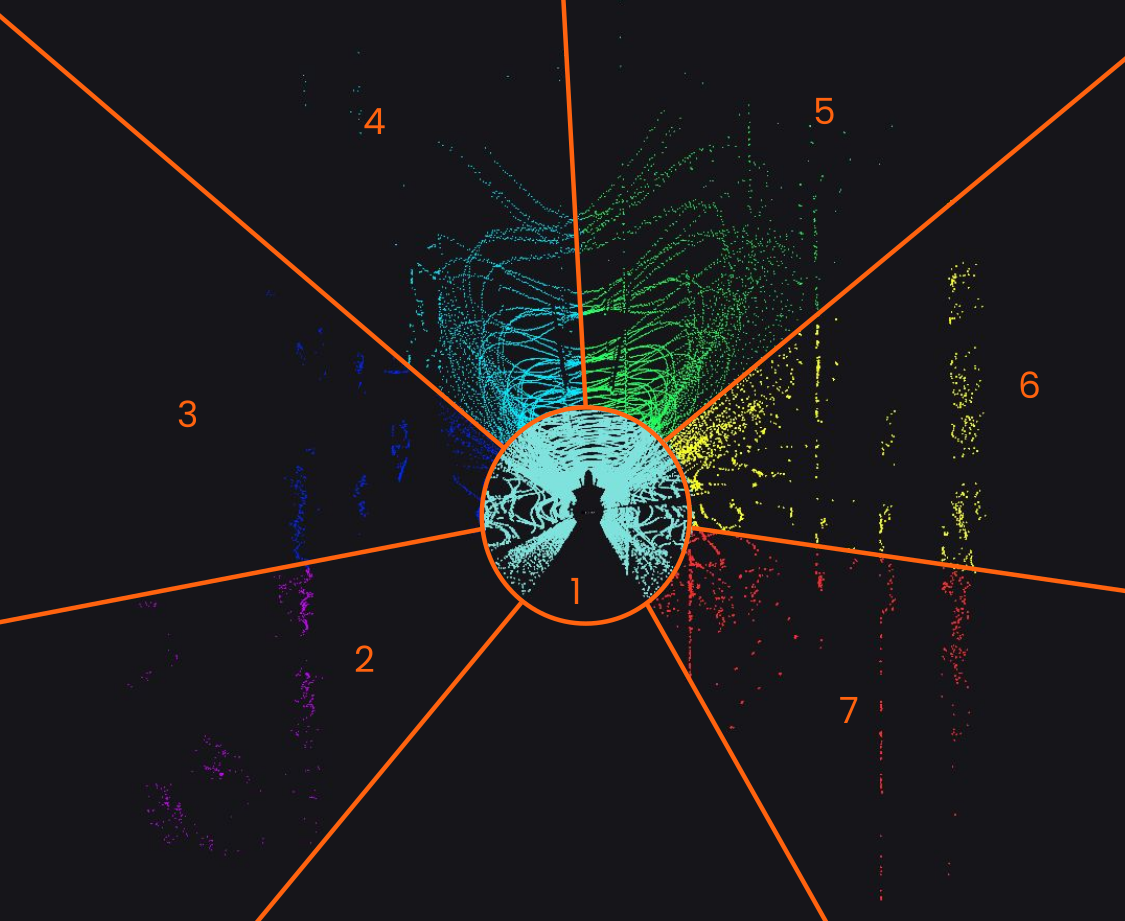
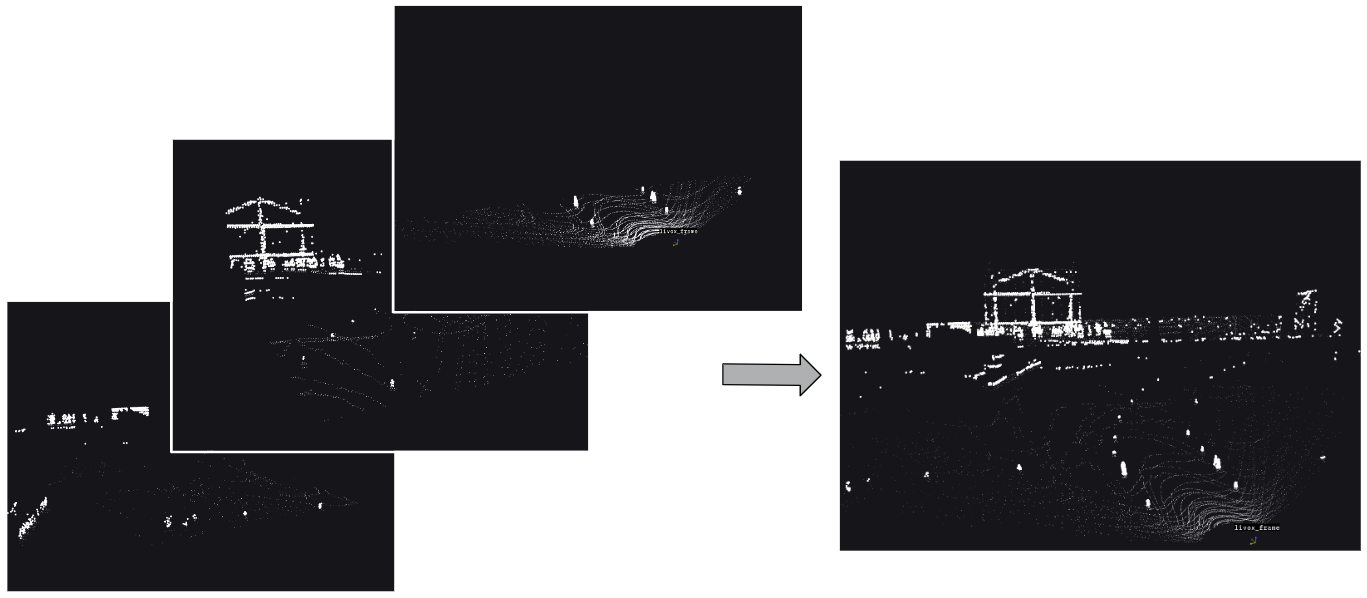
Formula Student is an international engineering competition where university teams design and build race cars. Its autonomous branch, Formula Student Driverless, challenges teams to develop fully self-driving vehicles. As a member of Elbflorace, the Formula Student Team from TU Dresden, I worked on the perception pipeline of our driverless system. My main contribution was the implementation of a Multi-Region RANSAC algorithm for ground segmentation and obstacle detection from LiDAR point clouds. By dividing the scene into spatial regions and applying RANSAC locally, the system achieved more robust ground plane fitting and better handling of varying terrain. This approach significantly improved the reliability of downstream modules such as cone fitting and path planning.
Our team participated in Europe's biggest Formula Student competitions, including Formula Student Germany (FSG) at the Hockenheimring, which is considered the most prestigious event in the circuit. At FSG, we achieved remarkable results in the driverless category, successfully completing autonomous driving challenges and scoring high in both static and dynamic events.
- TechnologiesPython, ROS2, C++, LiDAR, Autonomous Systems, Docker, SLAM, Sensor Fusion
- WebsiteElbflorace